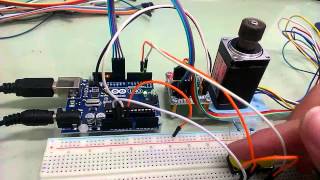
Arduino 入門教學:控制六線步進馬達@ 彥霖實驗筆記:: 痞客邦 | 六線步進馬達arduino

//本範例控制了3顆六線步進馬達inti=2;//速度2ms切換//馬達A腳位inta1=22;inta2=23;inta3=24;inta4=25;//馬達B腳位intb1=2;intb2=3;intb3=4;intb4=5;//馬達C腳位intc1=8;intc2=9;intc3=10;intc4=11;voidsetup(){ //初始化馬達A pinMode(a1,OUTPUT); pinMode(a2,OUTPUT); pinMode(a3,OUTPUT); pinMode(a4,OUTPUT); //初始化馬達B pinMode(b1,OUTPUT); pinMode(b2,OUTPUT); pinMode(b3,OUTPUT); pinMode(b4,OUTPUT); //初始化馬達C pinMode(c1,OUTPUT); pinMode(c2,OUTPUT); pinMode(c3,OUTPUT); pinMode(c4,...

// 本範例控制了 3 顆六線步進馬達
int i = 2; // 速度 2 ms 切換
// 馬達 A 腳位int a1 = 22;int a2 = 23;int a3 = 24;int a4 = 25;
// 馬達 B 腳位int b1 = 2;int b2 = 3;int b3 = 4;int b4 = 5;
// 馬達 C 腳位int c1 = 8;int c2 = 9;int c3 = 10;int c4 = 11;
void setup(){ // 初始化馬達 A pinMode(a1, OUTPUT); pinMode(a2, OUTPUT); pinMode(a3, OUTPUT); pinMode(a4, OUTPUT);
// 初始化馬達 B pinMode(b1, OUTPUT); pinMode(b2, OUTPUT); pinMode(b3, OUTPUT); pinMode(b4, OUTPUT);
// 初始化馬達 C pinMode(c1, OUTPUT); pinMode(c2, OUTPUT); pinMode(c3, OUTPUT); pinMode(c4, OUTPUT);}
void loop(){ A(); // 控制馬達 A B(); // 控制馬達 B C(); // 控制馬達 C}
void A(){ digitalWrite(a1,LOW); digitalWrite(a2,LOW); digitalWrite(a3,HIGH); digitalWrite(a4,HIGH); delay(i);
digitalWrite(a1,HIGH); digitalWrite(a2,LOW); digitalWrite(a3,LOW); digitalWrite(a4,HIGH); delay(i);
digitalWrite(a1,HIGH); digi...
取得本站獨家住宿推薦 15%OFF 訂房優惠

本站住宿推薦 20%OFF 訂房優惠,親子優惠,住宿折扣,限時回饋,平日促銷
Arduino 入門教學:控制六線步進馬達@ 彥霖實驗筆記:: 痞客邦 | 六線步進馬達arduino
Arduino筆記(24):回收商的42型步進馬達 | 六線步進馬達arduino
六線式步進馬達@ 四角酷創意工作室【工作日誌】 :: 痞客邦 | 六線步進馬達arduino
一般步進馬達如果要使用 | 六線步進馬達arduino
6線步進馬達- 人氣推薦 | 六線步進馬達arduino
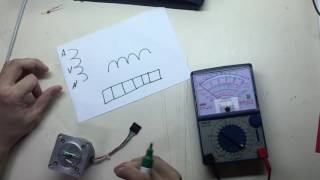
2相四線,四相五線,四相六線步進電機接線及驅動方法 | 六線步進馬達arduino
Micromouse – 步進馬達& CNC shield & A4988 (介紹) | 六線步進馬達arduino
mBlock & Arduino(16)控制步進馬達 | 六線步進馬達arduino
步進馬達控制實習 | 六線步進馬達arduino
Arduino筆記(24):回收商的42型步進馬達 | 六線步進馬達arduino
6線步進馬達 | 六線步進馬達arduino
5V 六線式步進馬達 | 六線步進馬達arduino
Arduino 入門教學:控制六線步進馬達 | 六線步進馬達arduino
Arduino筆記(8):控制步進馬達 | 六線步進馬達arduino
3V 1A 步進馬達 | 六線步進馬達arduino
17%OFF➚